
新的S7-200 SMART CPU支持PID自整定功能,在STEP 7-Micro/WIN SMART中也添加了PID調節控制面板。
用戶可以使用用戶程序或PID調節控制面板來啟動自整定功能。在同一時間最多可以有8個PID回路同時進行自整定。PID調節控制面板也可以用來手動調試老版本的(不支持PID自整定)CPU的PID控制回路。
用戶可以根據工藝要求為調節回路選擇快速響應、中速響應、慢速響應或極慢速響應。PID自整定會根據響應類型而計算出最優化的比例、積分、微分值,并可應用到控制中。
STEP 7-Micro/WIN SMART中提供了一個PID控制面板,可以用圖形方式監視PID回路的運行,另外從面板中還可以啟動、停止自整定功能。

圖1. PID調節控制面板
在圖1中:

圖中:
要使用PID調節控制面板,PID編程必須使用PID向導完成。
啟動自整定先決條件:
在開始PID自整定調整前,整個PID控制回路必須工作在相對穩定的狀態(穩定的PID是指過程變量接近設定值,輸出不會不規則的變化,且回路的輸出值在控制范圍中心附近變化。)
理想狀態下,自整定啟動時,回路輸出值應該在控制范圍中心附近。 自整定過程在回路的輸出中加入一些小的階躍變化,使得控制過程產生振蕩。 如果回路輸出接近其控制范圍的任一限值,自整定過程引入的階躍變化可能導致輸出值超出最小或最大范圍限值。 如果發生這種情況,可能會生成自整定錯誤條件,當然也會使推薦值并非最優化。
第一步:在PID向導中完成PID功能配置
第二步:打開PID調節控制面板,設置PID回路調節參數
在Micro/WIN SMART在線的情況下,從主菜單工具中點擊 進入PID調節控制面板中。
進入PID調節控制面板中。
在PID調節面板的h.區查看已選擇的PID回路號,在e.區啟動手動調節,調節PID參數并點擊更新,使新參數值起作用,監視其趨勢圖,根據調節狀況改變PID參數直至調節穩定。
- 使PID調節器基本穩定,輸出、反饋變化平緩,并且使反饋比較接近給定
- 設置合適的給定值,使PID調節器的輸出遠離趨勢圖的上、下坐標軸,以免PID自整定開始后輸出值的變化范圍受限制
參見:手動調整PID回路參數
第三步:在e.區點擊高級選項按鈕,設定PID自整定選項。如果不是很特殊的系統,也可以不加理會。

圖3. 設置PID自整定高級選項
在此允許你設定下列參數:
第四步:在手動將PID調節到穩定狀態后,即過程值與設定值接近,且輸出沒有不規律的變化,并最好處于控制范圍中心附近。此時可點擊e.區內的啟動按鈕啟動PID自整定功能,這時按鈕變為停止。這時只需耐心等待,系統完成自整定后會自動將計算出的PID參數顯示在e.區。當按鈕再次變為啟動時,表示系統已經完成了PID自整定。
第五步:如果用戶想將PID自整定的參數應用到當前PLC中,則只需點擊更新PLC。
完成PID調整后,最好下載一次整個項目(包括數據塊),使新參數保存到CPU的EEPROM中。
通過查詢系統手冊中 《PID回路和整定》章節,PID 回路表占用的存儲器 V 區地址中所代表功能,見表1-PID 回路表:
紅色:PID 自整定使能位、進行位、完成位、整定結果錯誤代碼
藍色:PID 自整定結束后的建議參數(含增益、積分、微分)
黃色:PID 運行時的增益積分微分,注意采樣時間僅在組態界面設置,不可隨意修改
綠色:PID 自整定高級選項設置(關于動態響應的,默認為快速響應)

表1. PID 回路表
PID 回路表中的 AT 控制字、狀態字、配置字節詳細描述見表 2:
ACNTL:Vx.0=1啟動 PID 自整定;Vx.0=0停止 PID 自整定
ASTAT:Vv.0=1自整定正在進行;Vv.0=0自整定沒有進行
ARES :Vm.7=1自整定完成;Vm.7=0自整定未完成。包含自整定結果代碼,方便錯誤查詢
ACNFG:Vn.2 和 3=動態響應設置
注意:自整定完成位必須為 0,自整定才能啟動
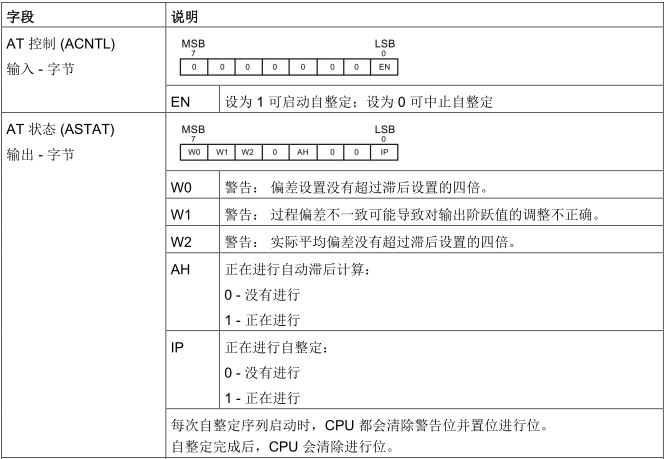
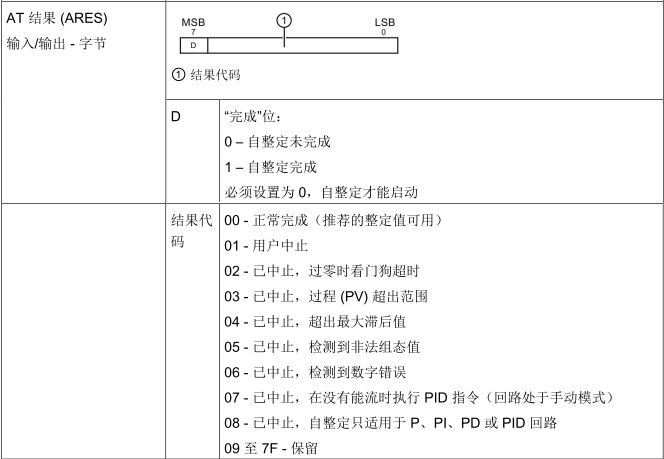
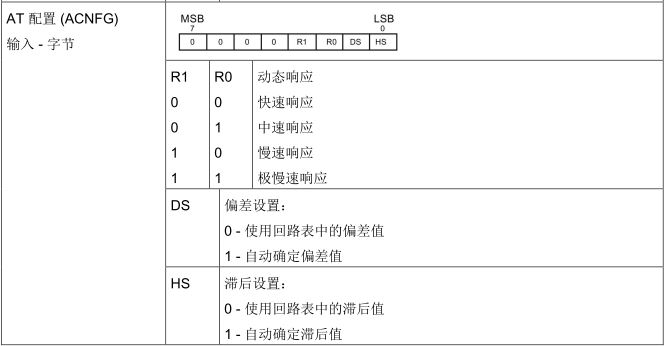
表2. PID 回路表控制字、狀態字、配置字節說明
PID 回路表中是針對于 PID 存儲器分配的首地址偏移量,若直接運用自整定部分控制字,具體地址可參考數據塊 PIDx_DATA,如下圖 4:

圖4. PID 回路符號表
對于 PID 自整定部分的編程思路簡略如下:
在觸摸屏上按鈕直接連接(如 M1.0),當按鍵按下時置位 PID 自整定使能位,啟動自整定。
只有 Vm.7=0 時才能啟動自整定功能,當 Vx.0=1 啟動自整定后,Vm.7=1 表示自整定完成,期間可以使用 Vx.0=0 隨時中止自整定過程。
通過程序中判定當 Vm.7=1 時表示 PID 整定已完成,將整定建議的參數傳送(move)到 PID 運行參數里。
取出 PID 整定結果字節后七位,作為自整定狀態和錯誤信息,如有錯誤可依此分析錯誤原因。具體代碼表示含義參見表 2。

圖5. PID 整定部分編程思路
通過程序啟動 PID 自整定(Vx.0=1)后,可以使用 PID 整定控制面板監視 PID 回路的運行,如下圖:
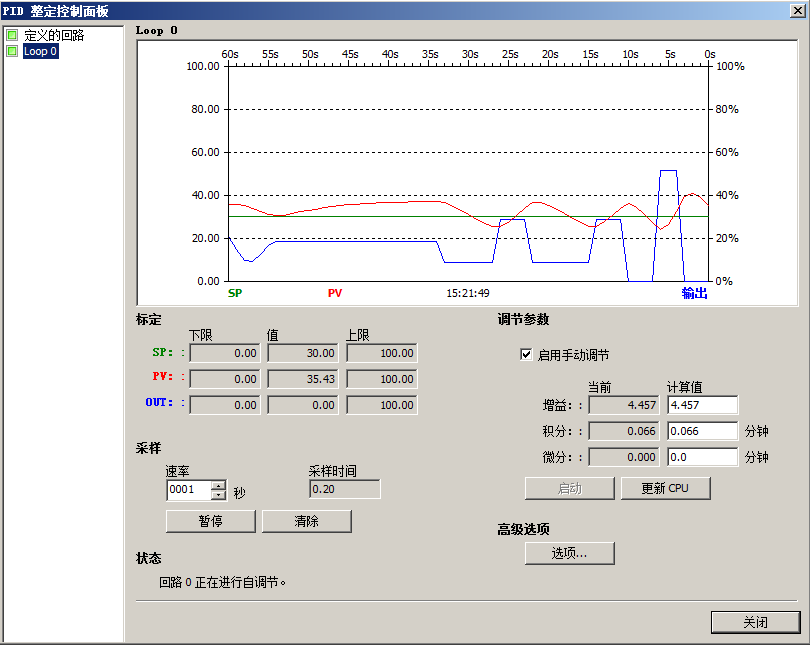
圖6. PID 整定控制面板
當自整定完成(Vm.7=1)后,程序執行將整定后的參數更新到 PID 參數中。為保證參數斷電后仍保持,建議在系統塊-〉CPU屬性-〉保持范圍中設置屬性,如下圖所示:
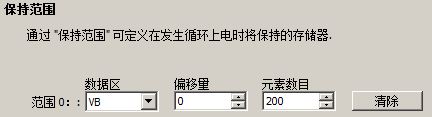
圖7. 系統塊中的保持范圍設置
為了更好地理解 PID 參數設置的編程,可參考下面的例程。
使用環境: STEP 7 Micro/WIN SMART V2.2
實現功能: 通過變量使能PID自整定
注意: 該例程僅設置一路 PID 向導配置,便于調試使用了 PID 被控對象的仿真庫。
![]() 注意:此指令庫/程序的作者和擁有者對于該軟件的功能性和兼容性不負任何責任。使用該軟件的風險完全由用戶自行承擔。由于它是免費的,所以不提供任何擔保,錯誤糾正和熱線支持,用戶不必為此聯系西門子技術支持與服務部門。
注意:此指令庫/程序的作者和擁有者對于該軟件的功能性和兼容性不負任何責任。使用該軟件的風險完全由用戶自行承擔。由于它是免費的,所以不提供任何擔保,錯誤糾正和熱線支持,用戶不必為此聯系西門子技術支持與服務部門。
電話:13916183699
郵箱:13916183699@139.com
網址:http://m.sdlxjt.com
地址:中國上海市青浦區北青公路7171號111-112室


